Key Building Blocks
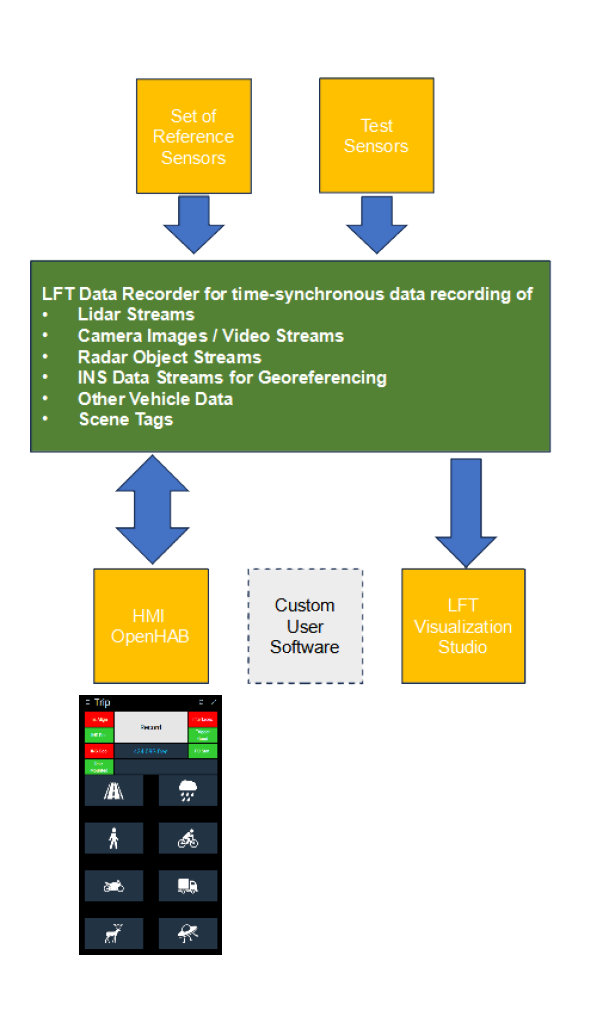
LFT Data Recorder Interfaces
The LFT Data Recorder is controlled by an open HAB Interface via MQTT. This interface permits tagging of objects in the scene or provides the status of the active sensor. The MQTT interface empowers customize software. The ROS2 compatible DDS interface permits real-time visualization of sensor data.